
The biggest problem with killing submarines has always been finding them. During WWI, no good method was found for a ship to detect submarines while the searcher was moving at any speed, and at night even a surfaced submarine was nearly impossible to see. Fortunately, the interwar years brought devices that would solve both problems, and ultimately lead to the defeat of the U-boats. During WWII, more sensors joined the fight against the underwater menace.
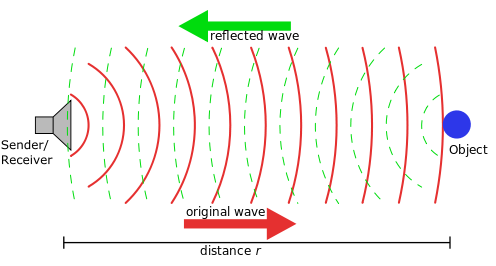
If sound was the only effective means of transmitting information through the water, and passive listening was insufficient, as it had proved during WWI, then the obvious answer was active sound detection, where a pulse is transmitted and the operator listened for echoes. This is best known today as active sonar.1 The idea actually predated the war, as the Fessenden Underwater Oscillator had been used to detect icebergs. The primitive amplifier technology of the time meant that it wasn't very effective against the weak echoes from submarines, and its relatively low frequency limited how well their direction could be pinned down. To make matters worse, the noise of a ship's motion through the water could easily drown out any echoes. Something better would be needed.
Early attempts at better sonar sound sources included such interesting ideas as explosives and hydrogen-oxygen reactions, but practical transmitters came in the form of piezoelectric and magnetostrictive transducers, which could turn electrical power into vibration and vice-versa. These allowed higher frequencies, which meant that the submarine could be located reasonably precisely. They also reduced the dead zone produced by switchover time considerably.2 Soon, the development of the heterodyne receiver allowed ultrasonic frequencies to be used, improving directionality still more.
A magnetorestrictive transducer
The resulting system consisted of a transducer, often a panel of quartz or Rochelle salt,3 serving as both transmitter and receiver. It was usually mounted in the ship's keel and covered by a canvas sonar dome. It rotated to allow searching around the ship, but fixed in elevation. This meant that it was blind if the submarine's depth was more than about 1/3rd of the range. Detection was by an operator using headphones to pick up reflections. The time the reflection took to arrive gave the range. Initially, this was done with a stopwatch, but soon systems were developed to automate ranging, and even detection to some degree. These were quite primitive, so the famous Plan Position Indicator (PPI) didn't show up until much later.4
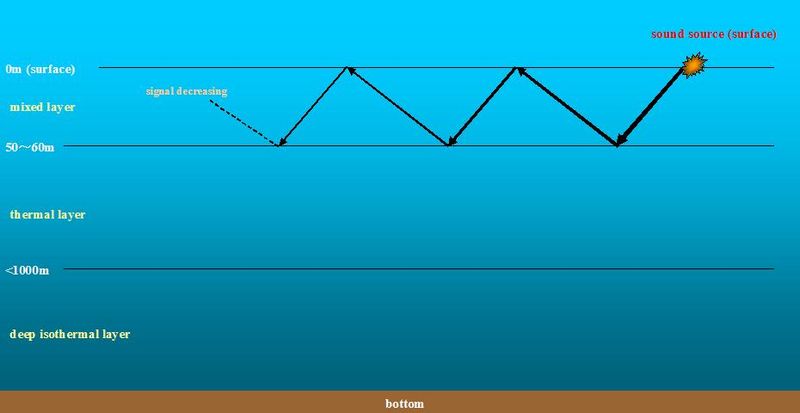
Another major interwar development was in the science of underwater acoustics. It was discovered that the temperature of water is not constant with depth, and that the resulting changes in the speed of sound twist sonar beams. Sound bends away from areas of higher velocity, which usually means warm water, although it can mean changes in salinity or pressure, too. Pre-WWII, this was usually bad news for the hunter. Velocity gradients bend the sound to create shadow zones where a ship's sonar cannot reach. Areas with lots of gradients, such as coastal waters, are not preferred for ASW because submarines can hide in these.
The surface duct5
This effect wasn't all bad news for the hunters, though. Before the 50s, the only relevant phenomenon was the Surface Duct.6 This occurs in areas where the velocity was increasing with depth. Sonar beams will bend upwards, then bounce off the surface, assuming the surface isn't too rough, and go back down. This can greatly increase range over a situation with no gradients, as the energy is trapped in the duct. However, it also means that a shadow zone can exist below the duct, particularly if the gradient reverses. Submarines like to hide under this layer.
By the late 30s, better sonar domes and improved isolation from self-noise had increased practical active sonar speed to around 25 kts. But it hadn't solved the problem of detecting submarines on the surface, particularly at night. Submarines of the time were not capable of operating underwater long-term, but they were extremely hard to see at night, when they would surface to recharge their batteries.

SG surface-search radar
The solution to this one came in the form of one of the war's great technical innovations, radar. Each power independently developed the idea of detecting things (mostly airplanes) by bouncing radio waves off of them during the 30s. However, early attempts at putting radar on an airplane by the British revealed that it would also be quite good at detecting ships and submarines on the surface. Later on, the invention of the cavity magnetron allowed much higher frequencies, which gave improved precision and allowed surface ships to be fitted with radars capable of picking up submarines, too.
ASV Mk II radar antenna
Radar changed the game for ASW. The early ASV radars finally allowed the aircraft of Coastal Command to hunt U-boats around the clock, and development during the war meant that smaller aircraft could carry them. By mid-war, carrier-based torpedo bombers were equipped with radar, and the Germans had to start using snorkels which allowed them to charge their batteries without surfacing. Even this wasn't enough to save them in the long term, as the allies simply developed a radar capable of detecting snorkels, at least in calm water.

Leigh Light
Radar wasn't perfect, though. Early radars had a minimum range of about a mile, and in the darkness that was more than the range the crew could spot the submarine at. Initially, aircraft dropped flares on the first pass, then dropped weapons on the second. However, this usually gave time for the U-boat to dive. The solution was the Leigh Light, a powerful spotlight carried on the wing of a bomber. The ability to make an attack on the first pass, before the U-boat could submerge, was crucial during the attacks on the U-boats transiting the Bay of Biscay on their way to and from their patrol areas.8
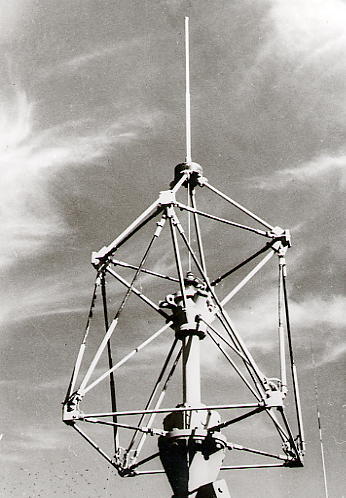
An HF/DF antenna
Of course, any source of radio waves can be detected and tracked back to the source. German wolfpack tactics required extensive use of radio communications, although they attempted to mitigate this by transmitting in short bursts. Fortunately, the Allies were able to develop High Frequency Direction Finding,9 which allowed them to successfully get bearings on the German transmissions. Ashore, stations were set up to triangulate on transmissions, providing locations passed back to the operations centers from which the Battle of the Atlantic was fought. HF/DF was also fitted to ships, which allowed them to detect nearby U-boats and steer to avoid them, or dispatch escorts to hold them down while the convoy escaped.
The last major sensor was the magnetic anomaly detector, MAD for short. This was a magnetometer towed behind an airplane which could pick up the disturbance in the Earth's magnetic field made by a submarine's steel hull. It was only effective on submarines within a few hundred feet of the aircraft, but it did provide airplanes with a sensor capable of detecting submerged submarines.
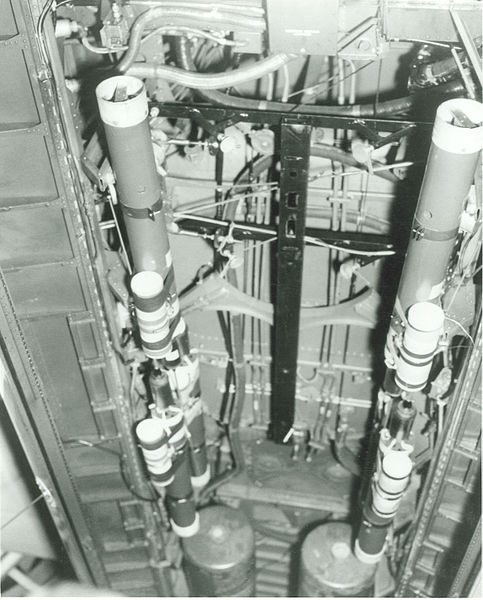
Sonobuoys in the bomb bay of a TBM
Another device that allowed aircraft to detect submerged submarines was the sonobuoy. This was essentially a parachute-dropped float with a passive hydrophone and a radio transmitter that would pass what the hydrophone picked up back to the plane. Early models were omnidirectional, but later versions did give at least some indication of the direction of the submarine. They were commonly fitted to large patrol airplanes and blimps.
Many different methods were tried to detect submarines during WWII, although the most prominent and effective were those that involved bouncing waves off the target, active sonar and radar. Next time, we'll look at how the submarine was killed after it was located.
1 Using sonar in this context is anachronistic. It wasn't given that name until WWII, by analogy to radar. Before that, it was usually known as ASDIC, but I'm going to use sonar throughout for simplicity's sake. ⇑
2 Essentially the time it takes for sonar to go from transmitting to receiving sets a lower limit on the range of the system. ⇑
3 Amusingly, one USN sonar from the beginning of WWII had both a Rochelle salt transducer and a magnetostrictive transducer in the same dome. The salt was more effective, but it was so unreliable that they had the other system as a backup. ⇑
4 It was first applied to radar during WWII, and I'm not actually sure when it was first used for sonar. ⇑
5 This drawing isn't entirely accurate, as the sound travels in smooth curves. ⇑
6 During the 50s and 60s, all sorts of weird acoustic phenomena were investigated and put into use. I've covered them here. ⇑
7 This was absolutely the only picture of a bow sonar dome I could find. The bow is floating vertically after it was blown clear of the stern. I apologize for the poor quality. Johan Larson suggests this photo of the sonar on an Oberon class submarine as an alternative. ⇑
{kind=link}
8 The colorful countermeasures games played between submarines and aircraft deserve a post of their own, and so are not covered here. ⇑
9 Abbreviated HF/DF, usually pronounced Huff-Duff. ⇑
For more on WWII ASW, see Hunters and Killers, Volume 1 and Volume 2.
Comments
For comment 6, couldn’t you use this picture of an Oberon class submarine, with it’s very prominent sonar dome?
I could, but it would violate my general policy of driving myself crazy looking for totally accurate photos. (That’s not a terrible idea, although I’ve grown fond of poor Fiske’s sonar dome since I found it. I've added this one as a footnote.)
Loved this article! Radar/Sonar is such an interesting topic in general and it's quite interesting to see the early efforts towards it.
Was there a technical reason why they didn't have active sonobuoys? If anything, it seems like the speed with which the aircraft move would make it much less dangerous to use active sonobuoys than to use active sonar on a surface ship or on a submarine.
@Chris
Thanks. I did find it interesting to research.
@RedRover
I think you're confused sonobuoys with dunking sonars. Sonobuoys are dropped by the airplane, so there's no way the submarine could use them to counterattack. That said, it is a reasonable question. As best I can tell, they simply didn't have the electronics to do proper active sonobuoys at the time. I think the first active sonobuoys were bistatic systems, where they'd drop an explosive charge, and then listen on the passive buoys. Later active systems were omnidirectional, and just reported range. Fairly recently, they've gotten directional active buoys. But I don't have firm numbers on this, because it's deeply buried, and I don't want to dig it out. Again, these have to be lightweight and cheap, which means limited sophistication.